Alongside having a wide field of view, virtual reality headsets are distinct from regular 3D displays in that they are tracked. PC VR, console VR and now even some standalone headsets even have positional tracking so you can lean, duck, and even walk around in VR.
But how does this tracking work? Here we’ll explain the main positional tracking systems and how they function.
Background
What is positional tracking? (6DoF)
Most mobile VR headsets like Oculus Go, Samsung Gear VR and Google Daydream View only have rotational tracking (3DoF). You can look up or down, to either side, or tilt your head. But if you try to lean or actually move your head’s position, this is not tracked. The entire virtual world will move with you. 3DoF controllers are similar, rotation-only. They essentially act as laser selection pointers.
This can be acceptable for seated content, but it doesn’t allow you to move around the virtual world physically, or to interact with it with your hands directly.
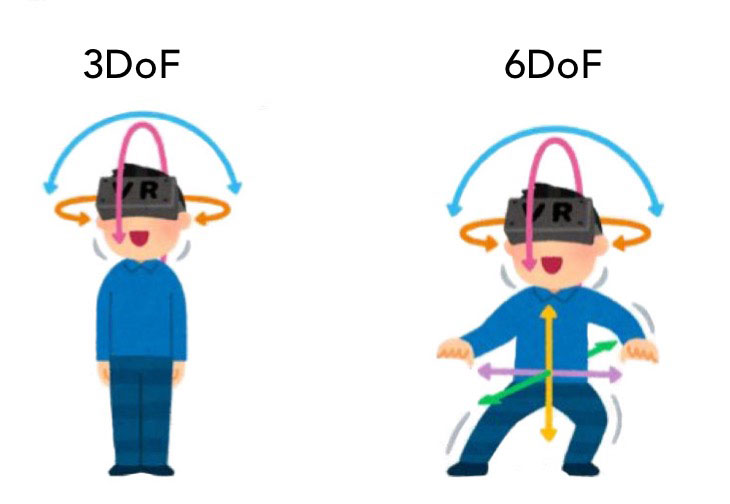
On PC and console VR, and now in high end standalone VR, the headsets feature positional tracking (6DoF). Positional tracking lets the user actually move around in the virtual environment. If the tracking volume is sufficient, you can even walk around your whole room in VR.
When controllers are also 6DoF, you can directly interact with virtual objects with your hands since you can move them through virtual space by moving your hands in the real world.
Tracking systems
Rotational tracking (3DoF) is always done with microscopic electromechanical gyroscopes. But different companies use different technologies to enable positional tracking (6DoF). While there may be a common industry standard some day, none exists yet. Companies have different ideas about which techniques are right.
The various tracking systems each balance cost, ease of setup, tracking volume, controller tracking range, and modularity.
The Common Base: Dead Reckoning
Contrary to popular belief, the optical systems described below are only truly “correction” systems. The primary shared tracking method of all these systems is a microscopic electromechanical accelerometer. These accelerometers typically run at 1000 Hz.
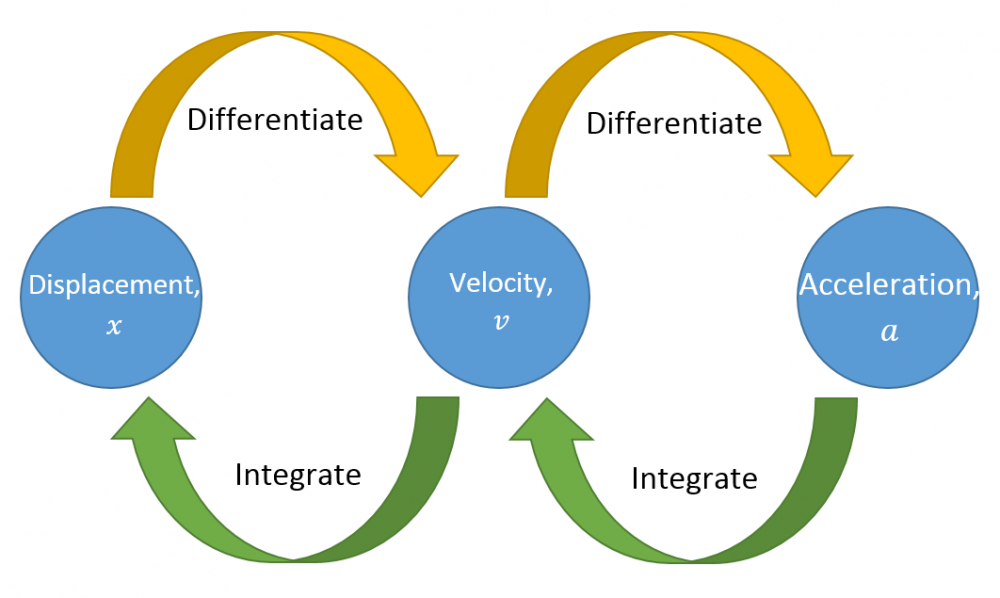
Here’s how this works: accelerometers do not read position, or even velocity, they read (as the name suggests) acceleration. But as you may remember from calculus, you can take the integral of acceleration over time and get velocity. And if you take the integral of velocity values over time, you get position (or at least, displacement from the original position).
Using this to determine change in position is called dead reckoning. From moment to moment it’s how every VR headset and controller tracks itself.
So why is anything else needed at all? Because accelerometers are imperfect, providing noisy data. Integrating this data twice means even the smallest error is magnified, and this error accumulates. In reality, this means that accelerometer based positional tracking drifts to infinity within a matter of seconds.
The purpose of VR tracking systems is to correct this drift by providing a reference. Each tracking system does it differently, but the purpose remains the same.
